Simulation for operational optimization
Simulation serves three functions in UAV operations: deployment planning, link planning, and predictive performance under varying conditions. Integrated into a single workflow, they produce a compounding set of operational returns: shorter flights, higher throughput per crew-day, and the link reliability needed to bid and win work that requires documented RF performance.
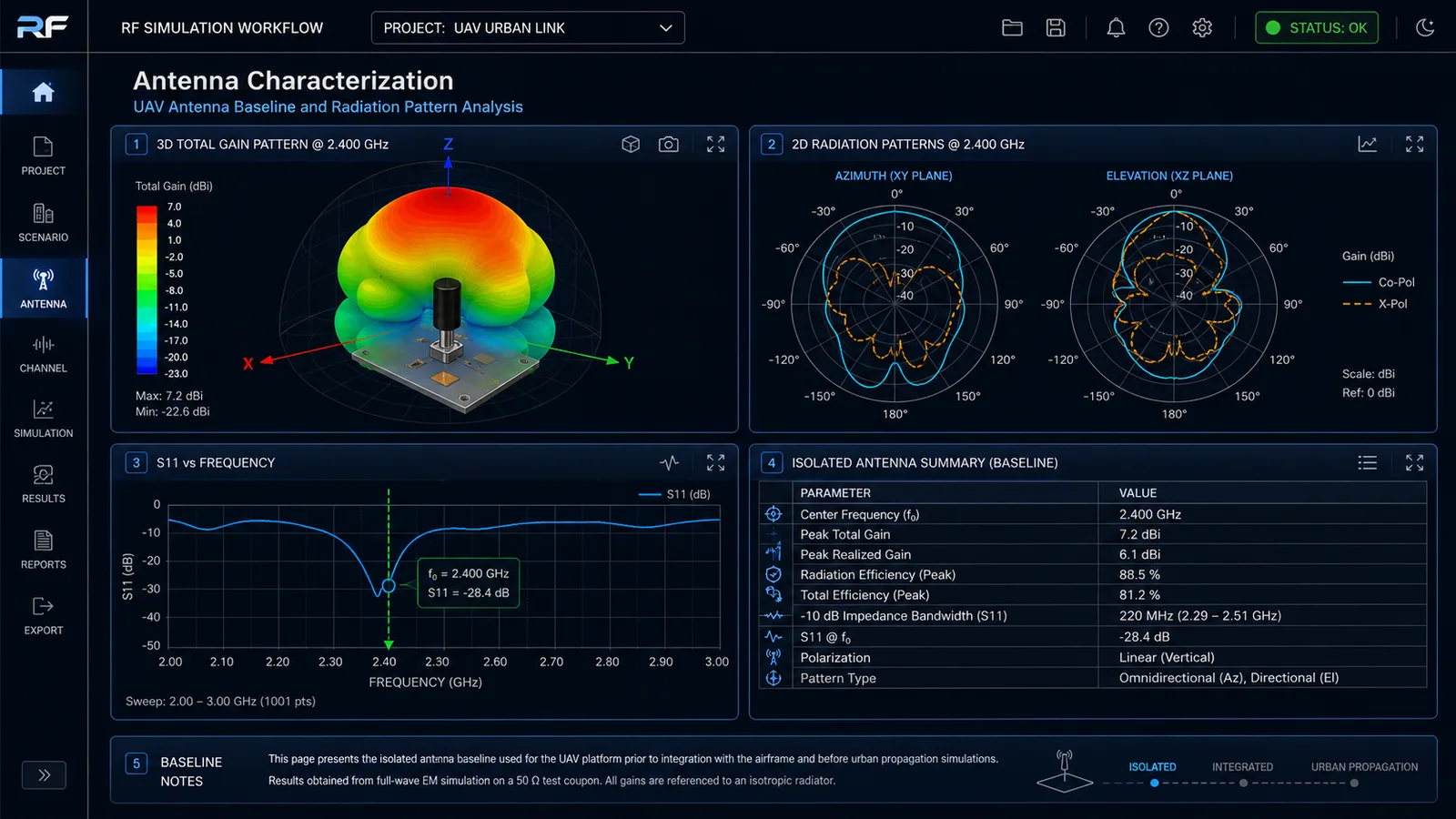
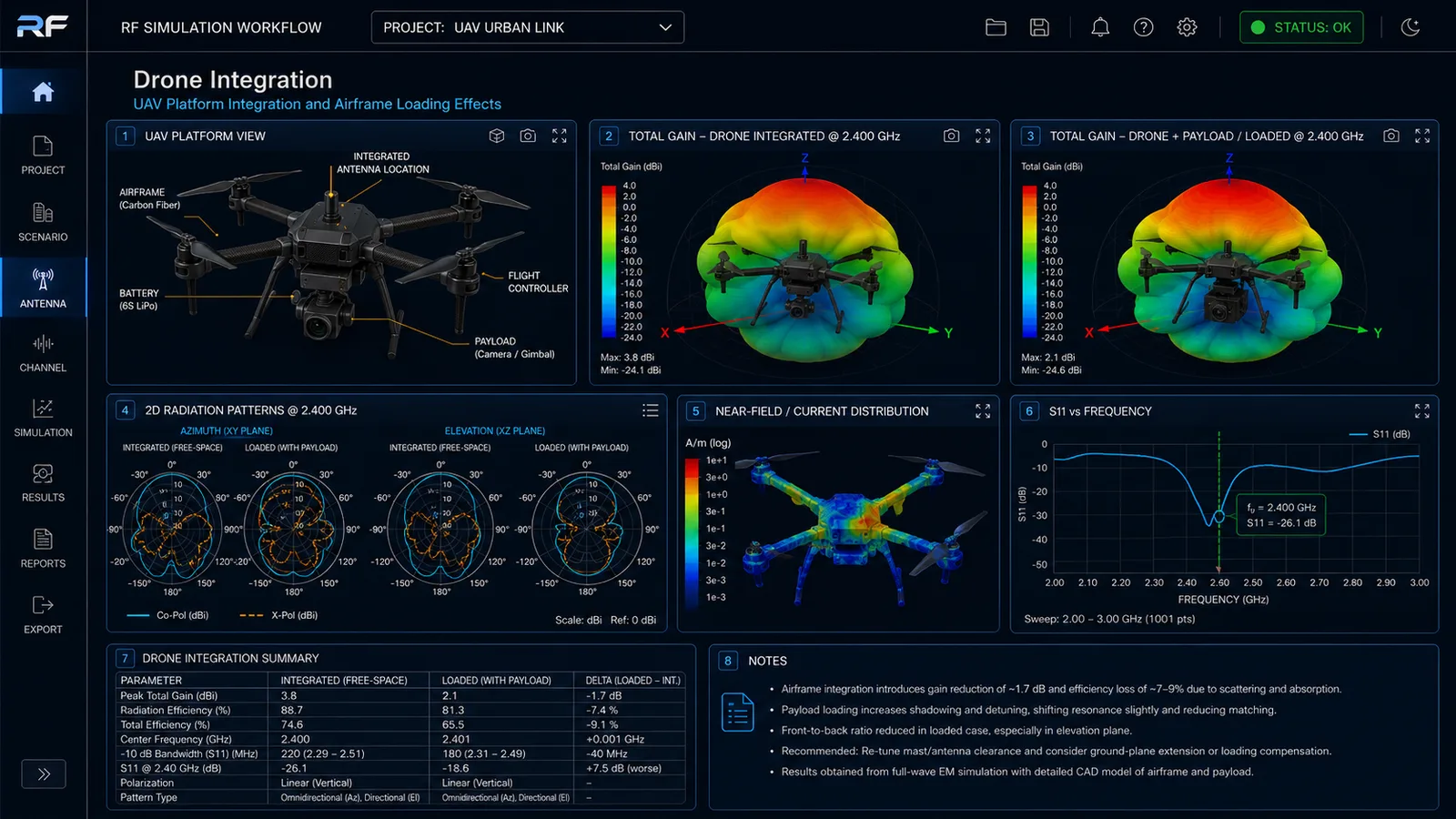
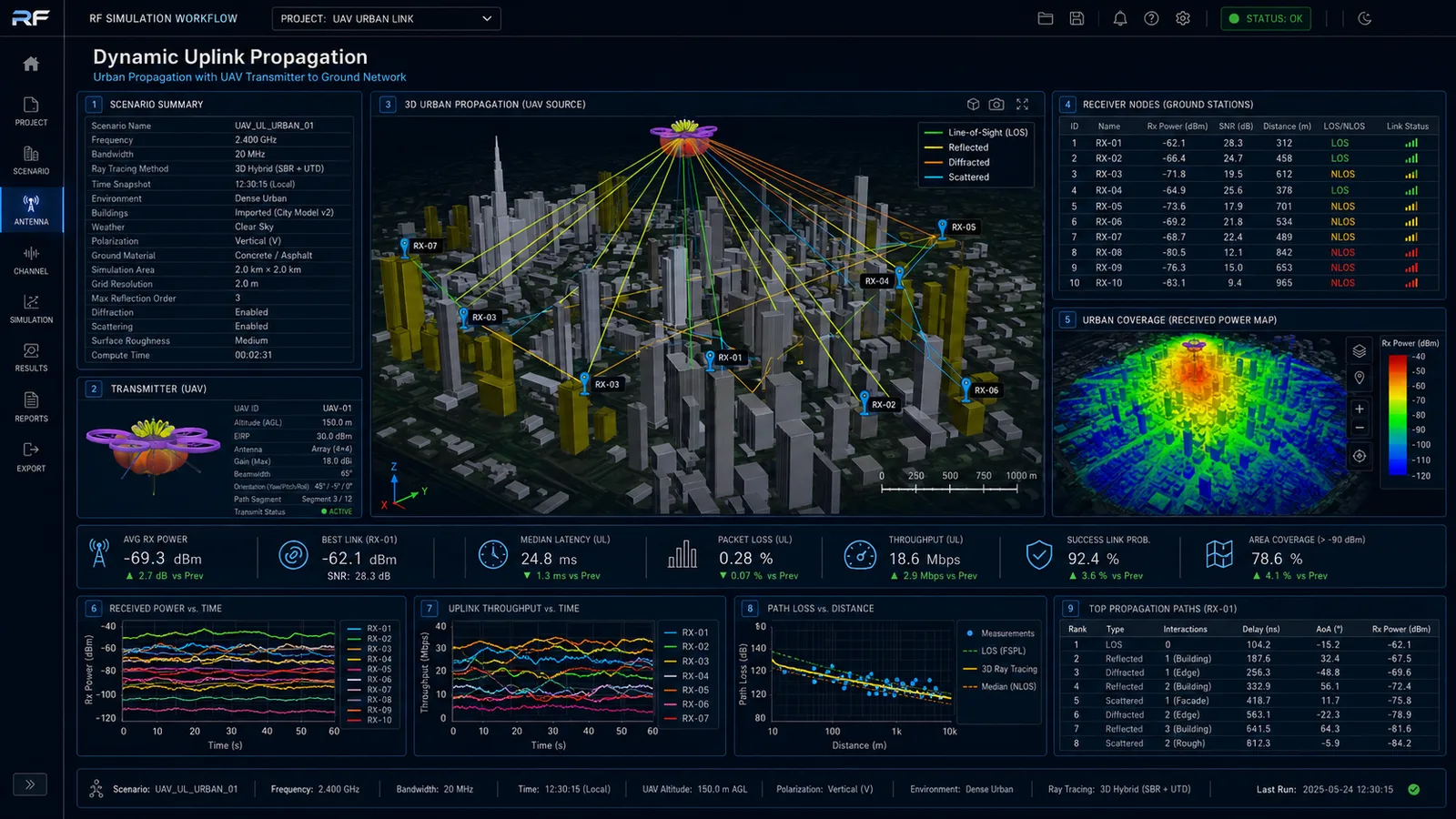
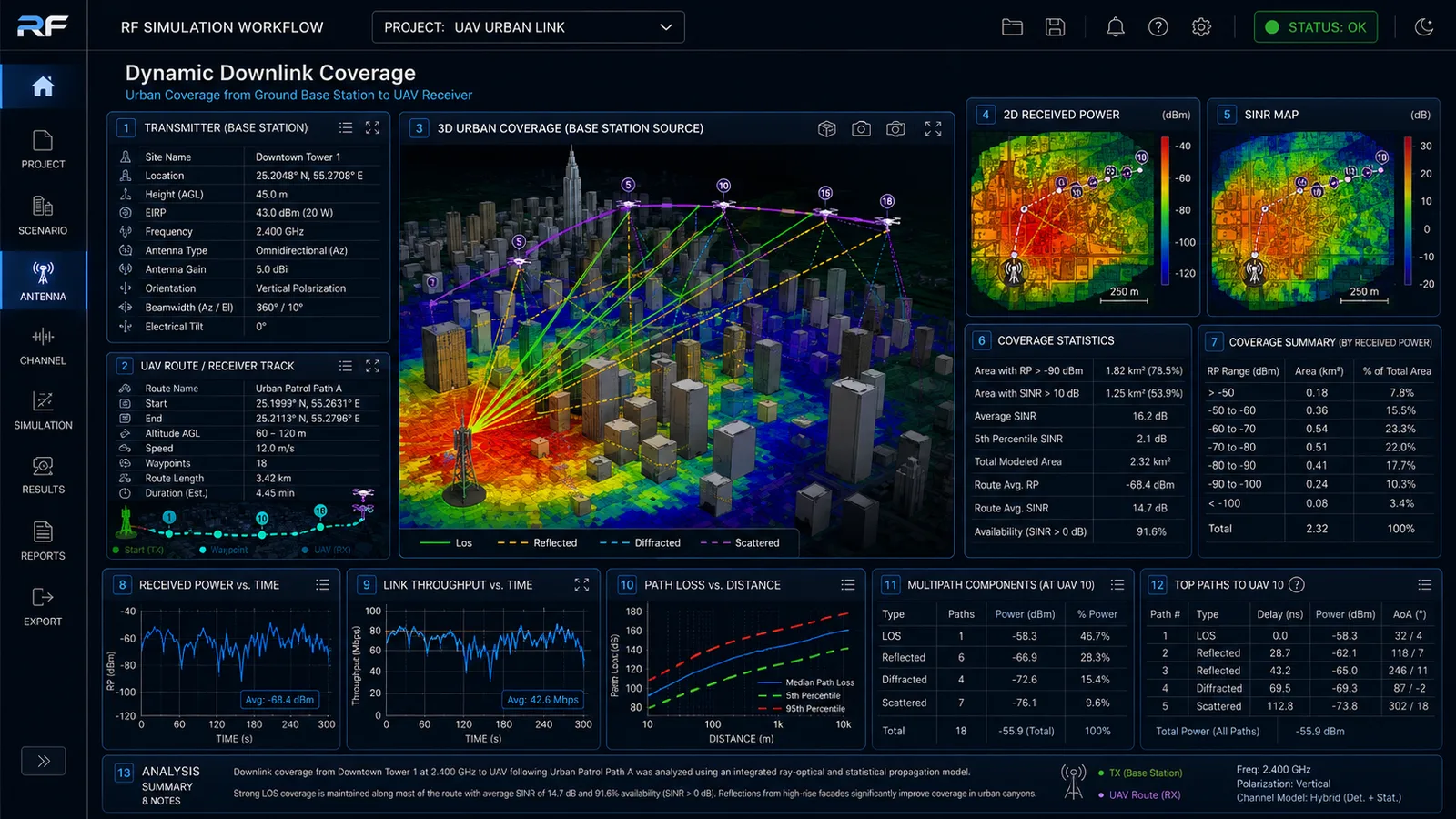
The cumulative effect is measurable. Less battery spent recovering from signal loss. Fewer reflights. Pre-flight deliverables that shift client conversations from uncertainty to documented expectation. The workflow moves in stages: antenna characterization, drone integration, dynamic propagation, network scaling, operational optimization, and telemetry feedback. Each stage answers a different question.
The return is operational. With route, link margin, and coverage validated before the aircraft moves, operators fly more complex missions with confidence and complete them in less time. The compound effect is more missions per crew-day, on work that would otherwise be out of reach.